大耳朵图图
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
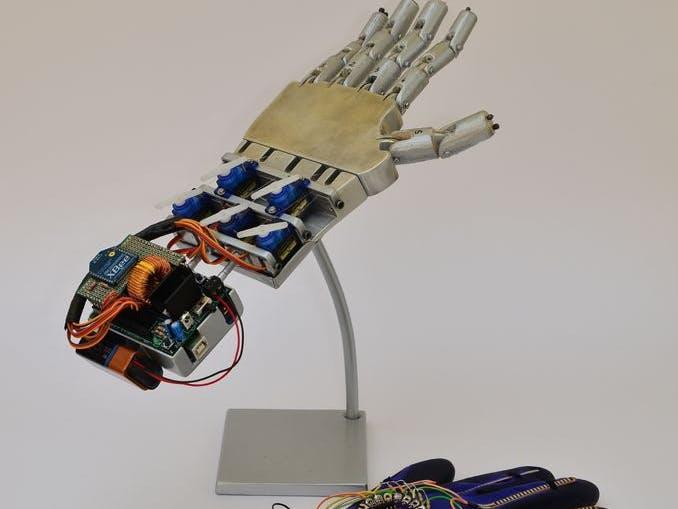
使用Arduino制作遥控机器人手臂的过程包括准备硬件组件、搭建连接、编写代码和调试测试。通过无线通信和传感器输入,控制伺服电机实现机器人手臂的动作。这个项目可以应用于教育、娱乐和研究等领域,让人们更直观地了解机器人技术,并进行简单的操作和控制。
解决方案:
使用Arduino制作遥控机器人手臂的过程如下:
1. 准备硬件组件:Arduino UNO&Genuino UNO、Arduino LilyPad主板、XBee S1(跟踪天线)、SparkFun XBee盾牌、SparkFun Xbee Shield for Lilypad、SparkFun LilyPad FTDI基本突破 - 5V、Flex Sensor 2.2“、47千欧姆电阻、AAA电池、3xAAA电池盒、9V电池(NiMh可充电)、机器人盾牌、5V伺服电机。
2. 根据附件教程,按照指导进行搭建。首先,将Arduino UNO与机器人盾牌连接,然后将XBee S1模块插入SparkFun XBee盾牌,并将SparkFun XBee盾牌插入Arduino UNO。接下来,将SparkFun LilyPad FTDI基本突破 - 5V连接到Arduino LilyPad主板上。将Flex Sensor 2.2“与47千欧姆电阻连接,并将其连接到Arduino LilyPad主板上。最后,将5V伺服电机连接到机器人盾牌上。
3. 编写代码。使用Arduino IDE编写代码,通过XBee模块实现无线通信。根据传感器的输入,控制伺服电机的运动,从而实现机器人手臂的动作。可以根据需要自定义动作序列和灵敏度。
4. 调试和测试。将Arduino LilyPad主板连接到电脑上,上传代码到Arduino UNO,并将XBee模块与电脑进行配对。戴上带有传感器的手套,通过手的动作控制机器人手臂的运动。根据需要进行调试和优化,确保机器人手臂的运动准确和流畅。
通过以上步骤,您可以使用Arduino制作一个遥控机器人手臂。这个手臂可以通过带有传感器的手套无线模拟手的动作。这个项目可以用于教育、娱乐或者研究等领域,让人们更加直观地了解机器人技术,并且可以进行一些简单的操作和控制。希望这个解决方案对您有所帮助!
使用Arduino制作遥控机器人手臂的过程如下:
1. 准备硬件组件:Arduino UNO&Genuino UNO、Arduino LilyPad主板、XBee S1(跟踪天线)、SparkFun XBee盾牌、SparkFun Xbee Shield for Lilypad、SparkFun LilyPad FTDI基本突破 - 5V、Flex Sensor 2.2“、47千欧姆电阻、AAA电池、3xAAA电池盒、9V电池(NiMh可充电)、机器人盾牌、5V伺服电机。
2. 根据附件教程,按照指导进行搭建。首先,将Arduino UNO与机器人盾牌连接,然后将XBee S1模块插入SparkFun XBee盾牌,并将SparkFun XBee盾牌插入Arduino UNO。接下来,将SparkFun LilyPad FTDI基本突破 - 5V连接到Arduino LilyPad主板上。将Flex Sensor 2.2“与47千欧姆电阻连接,并将其连接到Arduino LilyPad主板上。最后,将5V伺服电机连接到机器人盾牌上。
3. 编写代码。使用Arduino IDE编写代码,通过XBee模块实现无线通信。根据传感器的输入,控制伺服电机的运动,从而实现机器人手臂的动作。可以根据需要自定义动作序列和灵敏度。
4. 调试和测试。将Arduino LilyPad主板连接到电脑上,上传代码到Arduino UNO,并将XBee模块与电脑进行配对。戴上带有传感器的手套,通过手的动作控制机器人手臂的运动。根据需要进行调试和优化,确保机器人手臂的运动准确和流畅。
通过以上步骤,您可以使用Arduino制作一个遥控机器人手臂。这个手臂可以通过带有传感器的手套无线模拟手的动作。这个项目可以用于教育、娱乐或者研究等领域,让人们更加直观地了解机器人技术,并且可以进行一些简单的操作和控制。希望这个解决方案对您有所帮助!
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
大耳朵图图
所在区域: 全国
大耳朵图图是一家专注于智能家电和物联网领域的公司。我们的团队由一群充满创造力和激情的美女工程师组成,擅长于开发各种智能设备和解决方案。
我们的产品涵盖了多个领域,包括智能家居、工业自动化、监控系统等。我们的解决方案包括智能插座、智能锁、智能灯等,可以实现远程控制和智能化管理。我们还开发了各种传感器,如超声波传感器、水位传感器、光传感器等,可以实现环境监测和数据采集。
我们的案例包括智能家居安全系统、人体感应报警器设计、基于Raspberry Pi的智能手机等。我们还提供了一系列基于Arduino和树莓派的开源硬件项目,方便用户进行二次开发和定制。
我们致力于为客户提供高质量的产品和解决方案,以满足不同行业的需求。无论是家庭用户还是企业客户,我们都能够提供专业的技术支持和优质的售后服务。
如果您对智能家电和物联网领域感兴趣,欢迎联系我们,我们将竭诚为您提供最佳的解决方案。