xiaoxiaohaii
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
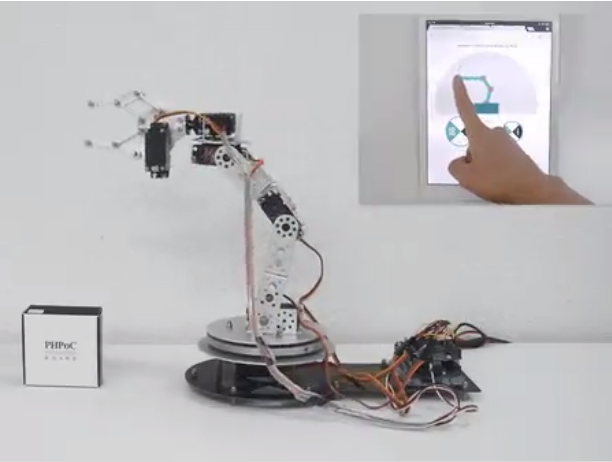
我们提供基于Arduino的通过Web控制机器人手臂执行动作的解决方案。通过硬件准备、系统架构、网络控制、电机控制和测试优化等步骤,实现了用户通过Web界面控制机器人手臂动作的功能。这个解决方案适用于工业自动化、教育培训等领域,为用户提供便捷的机器人控制方式。
我们可以通过以下步骤实现基于Arduino的通过Web控制机器人手臂执行相关动作的解决方案:
1. 硬件准备:准备一个Arduino UNO和Genuino UNO,以及适用于Arduino的PHPoC WiFi Shield。还需要一个6自由度(6DOF)的机器人手臂,该手臂包含6个电机,分别控制手臂的不同关节。
2. 系统架构:搭建系统架构,将Arduino UNO与PHPoC WiFi Shield连接。PHPoC WiFi Shield可以通过WiFi连接到网络,并提供Web服务器功能。Arduino UNO通过与PHPoC WiFi Shield的串口通信,接收来自Web服务器的指令。
3. 网络控制:编写相应的代码,实现通过Web界面控制机器人手臂的动作。用户可以通过浏览器访问机器人手臂的Web界面,选择不同的动作或者输入具体的动作参数。这些指令将通过WiFi传输到PHPoC WiFi Shield,然后通过串口发送给Arduino UNO。
4. 电机控制:在Arduino UNO上编写代码,解析接收到的指令,并控制相应的电机执行相关动作。根据用户的指令,Arduino UNO将发送适当的信号给机器人手臂的电机,以控制手臂的运动。
5. 测试和优化:进行系统测试,确保机器人手臂能够准确执行用户指定的动作。根据测试结果进行优化,调整代码和参数,以提高系统的稳定性和响应性。
通过以上步骤,我们可以实现基于Arduino的通过Web控制机器人手臂执行相关动作的解决方案。这个解决方案可以应用于工业自动化、教育培训等领域,为用户提供便捷的机器人控制方式。
1. 硬件准备:准备一个Arduino UNO和Genuino UNO,以及适用于Arduino的PHPoC WiFi Shield。还需要一个6自由度(6DOF)的机器人手臂,该手臂包含6个电机,分别控制手臂的不同关节。
2. 系统架构:搭建系统架构,将Arduino UNO与PHPoC WiFi Shield连接。PHPoC WiFi Shield可以通过WiFi连接到网络,并提供Web服务器功能。Arduino UNO通过与PHPoC WiFi Shield的串口通信,接收来自Web服务器的指令。
3. 网络控制:编写相应的代码,实现通过Web界面控制机器人手臂的动作。用户可以通过浏览器访问机器人手臂的Web界面,选择不同的动作或者输入具体的动作参数。这些指令将通过WiFi传输到PHPoC WiFi Shield,然后通过串口发送给Arduino UNO。
4. 电机控制:在Arduino UNO上编写代码,解析接收到的指令,并控制相应的电机执行相关动作。根据用户的指令,Arduino UNO将发送适当的信号给机器人手臂的电机,以控制手臂的运动。
5. 测试和优化:进行系统测试,确保机器人手臂能够准确执行用户指定的动作。根据测试结果进行优化,调整代码和参数,以提高系统的稳定性和响应性。
通过以上步骤,我们可以实现基于Arduino的通过Web控制机器人手臂执行相关动作的解决方案。这个解决方案可以应用于工业自动化、教育培训等领域,为用户提供便捷的机器人控制方式。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
xiaoxiaohaii
所在区域: 全国
xiaoxiaohaii是一家专注于物联网、蓝牙控制、单片机等领域的公司。我们擅长于开发各种智能设备和解决方案,包括飞行器电路原理图、瑞萨杯、四轴遥控器、六轴遥控器、自动化控制、智能家居控制、智能家电、自动灌溉等。我们的产品和解决方案广泛应用于家庭、工业、农业等领域。
我们的解决方案包括具有非接触式3D手势识别功能的智能开关、家庭自动化使用Arduino和蓝牙控制、使用Arduino Mega 2560制作的数字挂钟、使用Raspberry Pi建立自己的气象站、触摸屏显示的Arduino自动售货机、基于Arduino实现通过Web控制机器人手臂执行相关动作、带Arduino MKR FOX 1200的GPS追踪器、简易FFT音乐频谱显示等。
我们还提供了一系列基于ATmega8制作的创意作品,如苹果风二进制时钟、瑞萨R5F100LEA单片机实现的四旋翼飞行器电路原理图、源码、论文等。此外,我们还开源了基于STM32制作的微型四轴/六轴飞行器及配套遥控器电路原理图、源代码等。
xiaoxiaohaii致力于为客户提供高质量的产品和解决方案,我们拥有一支专业的团队,具备丰富的经验和技术实力。无论是个人用户还是企业客户,我们都能够根据需求提供定制化的解决方案,并确保产品的稳定性和可靠性。我们期待与您合作,共同推动物联网和智能化技术的发展。